Disclaimer
This is a simple tool born as a way to calculate the weight of the aircraft for CV ops. It then slowly evolved into something more complex. It was never intended as something available to the public so it is not really immediate to use and there aren’t many controls to prevent the user from nuking it (although Ctrl+Z usually saves the day). Feel free to use it and customize it.
Details
Current versions: 3.0
Components
- MDCG. This is the actual planning suite. Add the latlongs of your waypoints, along speed, altitude, payload, comms plan, agencies, and so on, and the planned calculates the fuel plan (for the supported aircraft, at the moment only the F-14B with DCS standard CAP configuration 4/2/2), timings, NAVGRID references and more.
- Kneeboard. These are the pages where all the data input and computation flow into
- Database. In this spreadsheet the details of airfields, waypoints, aircraft, threats and so on are stored. There is no need to copy this unless you plan to customize it. You can use different databases at the same time as long as you define in them as sources in Planner → Mission Options (e.g. you can use a different one for the radio frequencies but use the original database for waypoints and threats).
“Installation”
Not really an installation as you only need to make a copy of the MDCG, but there are a couple of things that require manual attention due to how Google Spreadsheet works.
After copying the Kneeboard,
open the ‘MDCtgt’ sheet in the second Spreadsheet and change the source (cell E1) to match the URL of your copy of the Planner (just the URL, nothing else). It will ask you allow access to that URL, confirm the request.
Both MDC pages use simple scripts for showing or hiding pages or restore the data queries after manual inputs. Check the script file itself before allowing it to run.

Changelog
- Version: 3.0
- Added support for multiple aircraft (multiple loadouts, restrictions, fuel model, etc);
- Added YY references (YY Δ) to Planner and Kneeboard;
- Added Expected Threats. It dynamically changes from AN/ALR-67 to AN/ALR-45 depending on which F-14 is selected (note that AN/ALR-45 info are not displayed. Need info from HB about its implementation);
- Added preset in the Payload page that change dynamically depending on the F-14 selected;
- Fuel models are now dynamically loaded and only the present are available;
- Added “New Mission” button in the Mission Option. It resets every field in the MDCG;
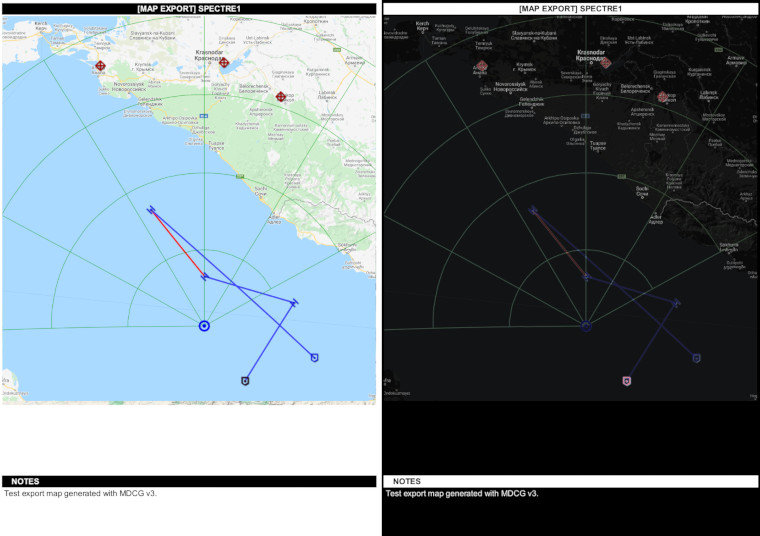
- Added “Map Export”, a simple tool to export a map to Google Maps (file is saved in Google Drive, download it and upload it to Google MyMaps). More info below;
- Added “Fuel Calculator”, useful if you are not interested in using this tool for planning but want to estimate the fuel used. It is similar to the function in the Payload sheet but calculates the consumption using flight legs and their settings (altitude, speed, distance);
- Version: 2.0b
- Added Syria with Aerodrome Charts by CombatWombat;
- Added simple DMS→DDM converter;
- General QOL stuff (buttons, polishing, etc);
- Version: 2.0
- Refined Bingo, Joker and Playtime calculator;
- Wind calculation (trigonometry-based) adjusted;
- Structural changes to the MDC organization (i.e. data is imported and exported from/to different sheets);
- Added Flightplan tool;
- Added Airfields LatLong input, useful for CV ops;
- Added Aerodrome Charts for PG, courtesy of Papi.
- Version: 1.2
- Added bingo fuel calculator;
- Added moving CV calculator (estimates how far the CV will move depending on BRC, speed and time).
Usage
The following video shows some features of v2.0. The general usage of the MDCG is still the same, but features are constantly changing.
New V3.0: Map export for Google MyMaps
Waypoints, POI and Bullseye are automatically copied into this function. You can set the width of lines, colour and icons (behold my zero GIMP skills!) here. Then press Generate and Save. The file is saved in your Google Drive, in a folder that matches the name in the top-left part of the sheet. The Save function tries to bin any file in that folder matching the name before creating a new one.
Once that’s done, download the file and upload it to Google MyMaps. Import the layer by pointing at the saved file.
NAVGRID: The map export supports the NAVGRID (settings are not validated so you draw unexpected stuff as well – check the manual!). The idea is providing the RIO with a simple means to correlate the position of the YY with the terrain, location of any POI and so on. It is especially useful in Air to Ground missions to check the terrain and validate the position of the IP (be aware that there is a slight discrepancy between the positions in Google Maps and DCS).
The map import to MyMaps can be also viewed in Google Maps (it takes a few minutes after importing). As far as I read, it should be possible to add an elevation to the WP, but I have not time to look into this at the moment.




The thumbnail of the generated map can be automatically exported to the kneeboard (good find Snakeice!). The map view is not imported 1:1 to the kneeboard so more than one test may be necessary (refresh the Kneeboard spreadsheet). If you see an error in the Kneeboard pages, make sure the maps is Shared to Public.
If this process is too convoluted for you (can’t blame you, I don’t really use it either) you can still export the Notes and use another tool (from copy-pasting via GIMP or using Windows’ snipping tool – [LWin] + [Shift] + [S]) and then paste the map in the Kneeboard. Voilà, a couple of seconds and the map is done.
You must be logged in to post a comment.