
The KLJ-7 Fire Control Radar provides the pilot with a number of air-to-air radar modes. To clarify things, we can first divide them into categories, with the caveat that certain modes fall into more than one. This simplified structure applies to most fighter jets:
- Searching;
- Tracking;
- WVR (ACM/BFM).
Before diving into the radar modes, a reminder that my previous article introduced concepts such as bars, azimuth, Zero-Doppler, Main Lobe Clutter and much more whereas this article jumps straight into the interesting stuff. If you feel lost, please check the links in the description box below.
Search Modes
The main peculiarities of air-to-air radar search modes are, usually, the lack of focus on a single target and the volume of airspace illuminated.
The KLJ-7 provides three search modes:
- Velocity Search, VS;
- Range-While-Search, RWS;
- Track-While-Scan, TWS or Twiz.
More or less, these modes absolve a similar function: build and maintain Situational Awareness.
There are two parameters worth considering to differentiate them: detection range and depth of information provided.
Following the first criterion, Velocity Search is the most performing. VS, in fact, does not provide ranging information, a feature that can affect the detection range, as Quaggles’ brilliant chart shows.
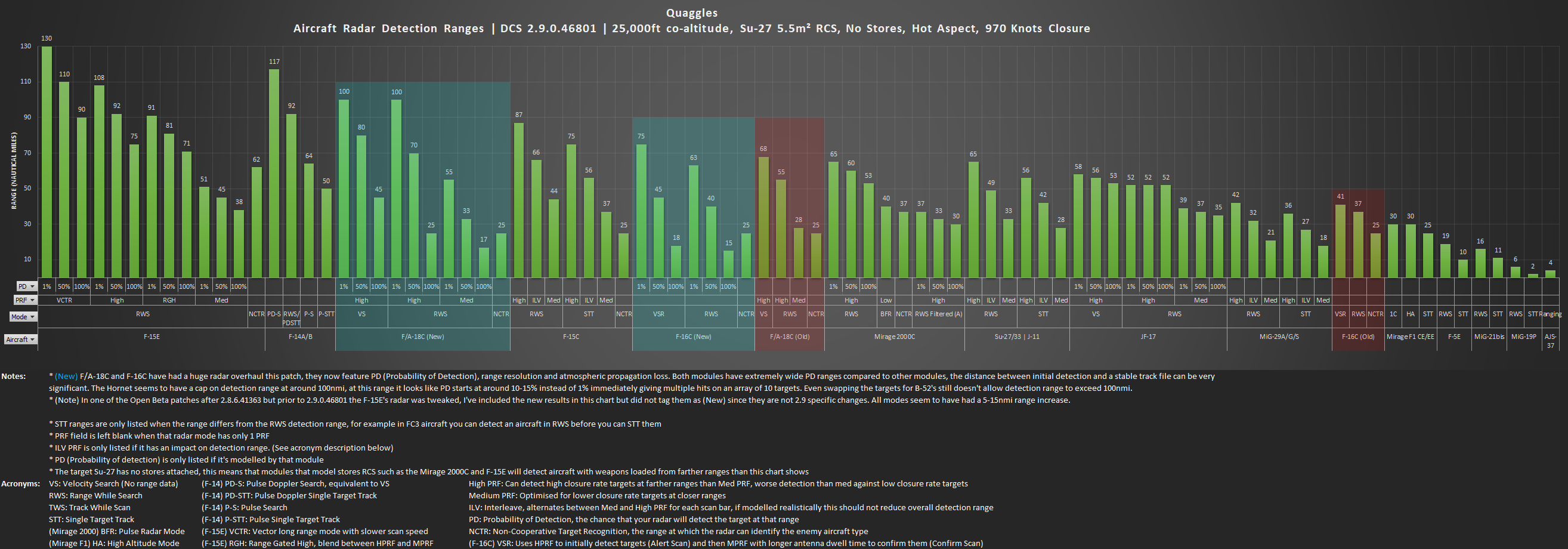
Source: Quaggles.
Both RWS and Twiz are slightly more limited, but moving on to the second parameter, they provide a plethora of additional details.
To summarise, this is how the three modes fare:
On a Range basis: Velocity Search, then Track-While-Scan and Range-While-Search together.
Considering the information provided instead: Twiz, then Range-While-Search, and lastly, Velocity Search.
Range-While-Search
As discussed in the previous article, Range-While-Search is capable of illuminating an unrestricted amount of airspace, from ±15° 1 bar to ±60° 4 bars, and provides returns onto a b-scope display. Every brick is a contact and at a glance, the pilot can assess the relative azimuth or Antenna Train Angle (ATA), the range, and the altitude of the bogey. The “trail” of bricks, so to speak, can be used to eyeball the speed and heading of the contact and also whether it is on a Collision Course (CC) or not. It is important to recognise situations such as an established Collision Course as they indicate in advance potential dangerous situations. For instance, CC can be a symptom of our aircraft being intercepted – CC is something the AI loves to do. In the case of human players, the “T” or “dot” in the ASE may prompt such a manoeuvre, but players’ experiences vary so widely that it is harder to tell.
Back to Range-While-Search, this mode has several peculiarities. In primis, in conjunction with the HSD and Datalink function, it is capable of indirectly generating and updating what appear to be track files. This is something that, back in the Tomcat days, was an exclusive feature of, you name it, Track-While-Scan. Then, the lack of constraints allows it to cover as much airspace as needed. This, however, comes at a cost: refresh rate. A complete sweep of ±60° 4 bars requires about 8.1 seconds. Per sé, it is not bad, but when considering the probability of detection and the limited power of the KLJ-7, such an interval may be too much to provide reliable and critical information to the pilot. Since, usually, determining azimuth at a glance is far easier than the altitude, narrower modes, such as ±30° 4 bars or ±60° 2 bars, can be valuable compromises.
Track-While-Scan
Twiz is an infamous radar mode: it provides excellent Situational Awareness before the crew switches to reliable Tracking modes to engage the target. In DCS, instead, it’s a “factotum mode” due to its apparent lack of drawbacks, which makes it the most common means of employing on targets.
As the name suggests, Track-While-Scan generates contacts’ track files while still illuminating a certain amount of airspace, contrary to, for example, STT or Single-Target Track, which focuses on one single contact.
To do so, Twiz needs to maintain a precise schedule and reilluminate targets after a fixed amount of time by forcing the avionics to scan along a restricted set of bars and azimuth options:
- ±10°, 4 bars;
- ±25°, 3 bars;
- ±60°, 2 bars.
The collected information is used to assess heading and other information for each illuminated target, up to 10.
Creating trackfiles requires a certain amount of time, not long, but it can be detrimental if a snap lock and shot are necessary.
Velocity Search
Track-While-Scan and Range-While-Search have many similarities. Velocity Search, however, is very different. The standard azimuth versus range b-scope is replaced by azimuth versus closure rate (VC), and the pilot has no indication of the distance between the JF-17 and the contacts. Albeit confusing at first glance, Velocity Search provides a new information set, but at a cost.
In primis, VS is restricted to High PRF, acronym for Pulse Repetition Frequency. Therefore, the aspect of the contacts becomes a factor. On the other hand, Velocity Search has the longest detection range compared to TWS and RWS, possibly due to the lack of ranging, which cannot operate at the same distance as the “raw” radar, so to speak. Unfortunately, this advantage is not particularly marked due to the low power of the KLJ-7. Other radars, such as the F-14’s AWG-9, gain several tens of miles using similar radar modes.
The JF-17 pilot can still benefit from the information provided by Velocity Search. For example, they can:
- Assess contacts’ altitude using the altitude strobe;
- Monitor changes in Target Aspect and Aspect Angle by observing VC;
- Approximate the contacts’ speed and heading by considering drift and VC;
- Augment Situational Awareness by isolating targets with exceptionally high VC, which may indicate that the JF-17 is targeted.
Although Range-While-Search can be used to generate the track files displayed in Track-While-Scan and the HSI, Velocity Search does not provide such a feature.
Velocity Search resembles the Tomcat’s Pulse Doppler Search. However, there are a couple of fundamental differences. In particular, in the F-14 the MLC area is fixed, and the ZDF floats depending on the aeroplane’s speed. The KLJ-7 instead shows zero closure at the bottom of the scale, and the MLC area floats, something similar to what the Tornado F3 did as well. Therefore, the JF-17’s display does not show opening targets.
If you are unfamiliar with these topics, please refer to my previous article about the JF-17’s KLJ-7 FCR.
Conclusions
The three main search modes provided by the JF-17’s FCR allow the pilot to build Situational Awareness, maintain it and commit to engaging targets. Future articles will cover the next logical step: target acquisition, either one or up to two. This should enable an ab initio pilot to follow a launch-and-leave BVR timeline.
Eventually, the more Within-visual-range apt modes will be discussed, completing the series dedicated to the KLJ-7 in the air-to-air arena.
