
New module routine
As usual for any new module, I started from the Special Options. I noticed the trimmer settings and I immediately changed them to the familiar Central Position Mode, both for the Cyclic, but especially for the rudder pedals.

Second stop, clearing the controls. New devices and peripherals come with a pre-assigned set of functions. Although I can see the purpose, from my point of view it is not ideal as it may create conflicts, especially when it comes to axis, and more so when you have two dozen controls connected.
Therefore, the first thing I do is clearing every pre-assigned control for every connected device.
Aircraft most important thing: Trimmer
Unless you are flying a computer with wings (F-16C, F/A-18C and so on), the control you will use the most is the trimmer. Especially on rotary-wings.
For this reason and due to the lack of time, I immediately looked up in the manual how the trimmer works. Eventually, I assigned it to a 4-way switch and to the thumb-button where I had my Trimmer in the Ka-50. It worked like a charm.
This is an extract from the manual, page 63:
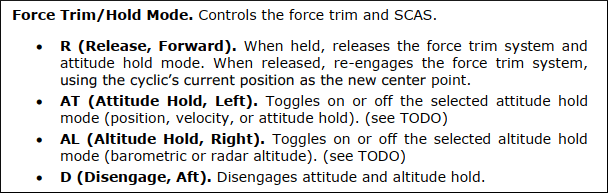
Since the page may change as the manual is expanded, simply: open the manual → [Ctrl]+[F] “trim” → Profit.
A bit of curves
My HOTAS is a 2017 Virpil T-50. The pedals, however, are a CH Pro Pedals I bought in early 2000s to improve my aim with the BK 3.7 on the Bf110 Zerstörer (I may have contributed to have that weapon banned in some Bellum war-style tournaments 😛 ).
Although old, they are absolutely great. However, they require a bit of turning due to the spring that returns them to the neutral position. Otherwise it is easy to overcorrect when force is applied to fight the spring. I set the following curve randomly before spawning in the aircraft, but I may need to expand the low-sensitivity area a bit more, to ease hovering.

Video!
This is the short video I put together. I recorded it after the first ~30′ for no particular reason, I just wanted to share my bit of appreciation to ED for this module. Although I have not flown a RW since the release of the F-14 (and no FW either, besides some tests), I had a ton of fun, and I immediately felt comfortable flying it.
Considerations
After the first 60 minutes spent playing with the Apache, I really think this is the easiest helicopter to fly in DCS. Here is why:
- Trimmer: I love it. It immediately felt like home, after so many years flying the Ka-50. It is predictable and allows for smooth adjustments, and it helps in the hardest manoeuvres by giving more “reach”. Furthermore, it feels somewhat in-between the Ka-50 with the Flight Director activated, and the normal operation with one or two APs disabled depending on the type of transition you are flying;
- General behaviour: as soon as this aircraft gains even the slightest forward momentum, its stability is rock-solid. Even when I tried to force some manoeuvres it disliked, I recovered it right away. Impressive;
- Powerful: the coaxial configuration of the Ka-50 gives the aircraft a lot of speed and power to play with. However, I had the feeling it is not as reactive as the Apache standard configuration is.
Whilst messing around, and I needed power to recover, the rotor really pulled the helicopter up with ease (the fact that I was clean and in cool weather helped, of course); - VRS: where is it? When transitioning from the translational lift, further slowing down to a hover and then landing, helicopters like the Hip require extra attention as they are incredibly susceptible to falling into VRS. The Ka-50 instead, it is very permissive in this regard. With the Apache, I wondered if there is a VRS at all!
- Simplicity: it is a general feeling, but consider this example: as much as I loved the Ka-50, I never liked routine manoeuvres such as holding a pattern in a HA or somewhere, waiting for instructions or coordinating with the Controller or other assets before “moving in”. It required some fiddling with the autopilots; otherwise it had the tendency of correcting towards the original “static” heading, not allowing the pilot to fully go “hands-off”. The Apache, once trimmed, stays there right away!
On the other hand, switching between the Ka-50 and the AH-64, and becoming proficient with the latter requires practice and study, as expected. These are the first few points that came to my mind, after flying for 60 minutes:
- Retrain Muscle memory: this aspect is what made me feel like home in the Apache. However, there are some differences. For example, my muscle memory invited to push my right pedal forward before the hover check. In the Apache, it is the opposite (weirdo!).
- Hovering: the transition from forward flight to a hover feels very different, and it may require some additional fiddling with the curves of the rudder pedals, due to their springs. This is expected, but in this regard, I found the transition from Ka-50 to Mi-8 simpler than moving from the Ka-50 to the AH-64 (descending and avoiding VRS is another matter though!);
- Quirks and Standard config properties: the coaxial configuration leaves a lot of room for “symmetric” manoeuvres, compared to the AH-64; “hard” manoeuvres especially.
I noticed how, depending on which side the helicopter is turning, one side tends to sink and cut into the turn (left), whereas the other feels smoother and less reactive without more collective input (right).
Another example is the tonneau: as I cut the collective, the turn almost stopped, whereas in the Ka-50 the rotational movement on the forward axis is not impeded, the Apache almost stopped in mid-air, and resumed only after a solid push forward on the throttle (yep, no collective here). - Fighting in the Apache: the Ka-50 is an impressive solo helicopter. The ABRIS does almost everything you may desire, and the ERBL function is a thing of beauty. However, the Apache is on another level of complexity and integration. Somewhat similarly to modern aircraft, the Apache is easy to fly, allowing the crew to focus more on getting the job done, rather than using a lot of their attention and effort on piloting.
More info
As mentioned in the video, a few friends asked me if I wanted to write a book/manual about the Apache, as I did for the F-14. The answer is no, I do not have time nor the knowledge to do it. Besides, the DCS community has Casmo already, which have first-hand experience with the Apache (I call this cheating 😉 ) so you can’t go wrong with him. Wags is releasing the usual good chunk of great videos, and RedKite has started as well.
On top of them, there are plenty of other content creators around, more qualified than me. I may write something in the future, but with the book to finish and the incoming F-4 Phantom II, I have no spare hands at the moment. Nevertheless, I plan to do more-flying-less-study with the Apache so, for example, I may write something about the controls (I have a couple of ideas about how the TM MFDs can be mapped – unless you want to buy the one being developed by TotalControls) and general operations.

Dear sir. Question: I try to make an Arduino sketch for the MPD,s from de AH64. Problem: Four MPD’s (pilot 2x and 2x copilot/gunner) with 2 MPD I have made. How can I control them separatly (pilot and copilot independent) from each other in one Arduino sketch. Tried a lot of options (discord: dcs bios Arduino fork), but without success! Perhaps you have an idea?
LikeLike
Hi Jan, how are you?
I’m uncertain if I understand the question: you have two MPDs, and you want to control the four MPDs in-game. Do you want to control them at the same time or as a function of the crew position you are using?
The first answer is tricky, as you can’t access the other cockpit without using DCS-BIOS and I don’t know how a button can control multiple DCS-BIOS outputs (I never tried, perhaps there’s a solution).
If you want to control the MPD in the cockpit you are sitting into, then it’s straightforward: use HID, then map the buttons accordingly using the control options in DCS.
For my TACAN I used both DCS-BIOS and HID, by doing, so I can use the TACAN with any module, and it auto-syncs with the only module I’m flying (or I wish I was flying, I haven’t flown a mission since mid-2020…): F-14 as RIO.
I hope this helps. Feel free to hop into my Discord, it makes chatting and sharing sketches much simpler 🙂
LikeLike